adds youtube to README
This commit is contained in:
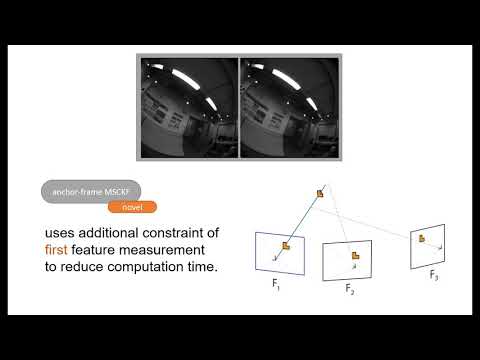
@@ -6,11 +6,13 @@ The `MSCKF_VIO` package is a stereo-photometric version of MSCKF. The software t
|
||||
This approach is based on the paper written by Ke Sun et al.
|
||||
[https://arxiv.org/abs/1712.00036](https://arxiv.org/abs/1712.00036) and their Stereo MSCKF implementation, which tightly fuse the matched feature information of a stereo image pair into a 6DOF Pose.
|
||||
The approach implemented in this repository follows the semi-dense msckf approach tightly fusing the photometric
|
||||
information around the matched featues into the covariance matrix, as described and derived in the master thesis[Pose Estimation using a Stereo-Photometric Multi-State Constraint Kalman Filter](http://raphael.maenle.net/resources/sp-msckf/maenle_master_thesis.pdf).
|
||||
information around the matched featues into the covariance matrix, as described and derived in the master thesis [Pose Estimation using a Stereo-Photometric Multi-State Constraint Kalman Filter](http://raphael.maenle.net/resources/sp-msckf/maenle_master_thesis.pdf).
|
||||
|
||||
It's positioning is comparable to the approach from Ke Sun et al. with the photometric approach, with a higher
|
||||
computational load, especially with larger image patches around the feature. A video explaining the approach can be
|
||||
found on [https://youtu.be/HrqQywAnenQ](https://youtu.be/HrqQywAnenQ)
|
||||
found on [https://youtu.be/HrqQywAnenQ](https://youtu.be/HrqQywAnenQ):
|
||||
[](https://www.youtube.com/watch?v=HrqQywAnenQ)
|
||||
|
||||
<br/>
|
||||
This software should be deployed using ROS Kinetic on Ubuntu 16.04 or 18.04.
|
||||
|
||||
|
||||
Reference in New Issue
Block a user