diff --git a/README.md b/README.md
index 12b6948..662c93c 100644
--- a/README.md
+++ b/README.md
@@ -11,7 +11,10 @@ information around the matched featues into the covariance matrix, as described
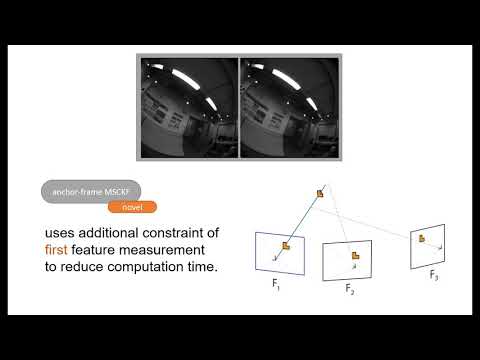
It's positioning is comparable to the approach from Ke Sun et al. with the photometric approach, with a higher
computational load, especially with larger image patches around the feature. A video explaining the approach can be
found on [https://youtu.be/HrqQywAnenQ](https://youtu.be/HrqQywAnenQ):
+
+
[](https://www.youtube.com/watch?v=HrqQywAnenQ)
+
This software should be deployed using ROS Kinetic on Ubuntu 16.04 or 18.04.