Compare commits
7 Commits
photometry
...
master
| Author | SHA1 | Date | |
|---|---|---|---|
| 43ac48bf56 | |||
| e9d801bdc1 | |||
| 4a5bdc735c | |||
| 9253fcab5f | |||
| 69d385f257 | |||
| 4842c175a5 | |||
| 9ded72a366 |
30
README.md
30
README.md
@ -1,12 +1,22 @@
|
||||
# MSCKF\_VIO
|
||||
|
||||
|
||||
The `MSCKF_VIO` package is a stereo version of MSCKF. The software takes in synchronized stereo images and IMU messages and generates real-time 6DOF pose estimation of the IMU frame.
|
||||
The `MSCKF_VIO` package is a stereo-photometric version of MSCKF. The software takes in synchronized stereo images and IMU messages and generates real-time 6DOF pose estimation of the IMU frame.
|
||||
|
||||
The software is tested on Ubuntu 16.04 with ROS Kinetic.
|
||||
This approach is based on the paper written by Ke Sun et al.
|
||||
[https://arxiv.org/abs/1712.00036](https://arxiv.org/abs/1712.00036) and their Stereo MSCKF implementation, which tightly fuse the matched feature information of a stereo image pair into a 6DOF Pose.
|
||||
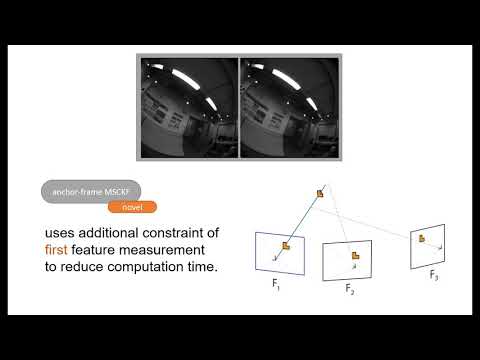
The approach implemented in this repository follows the semi-dense msckf approach tightly fusing the photometric
|
||||
information around the matched featues into the covariance matrix, as described and derived in the master thesis [Pose Estimation using a Stereo-Photometric Multi-State Constraint Kalman Filter](http://raphael.maenle.net/resources/sp-msckf/maenle_master_thesis.pdf).
|
||||
|
||||
It's positioning is comparable to the approach from Ke Sun et al. with the photometric approach, with a higher
|
||||
computational load, especially with larger image patches around the feature. A video explaining the approach can be
|
||||
found on [https://youtu.be/HrqQywAnenQ](https://youtu.be/HrqQywAnenQ):
|
||||
<br/>
|
||||
[](https://www.youtube.com/watch?v=HrqQywAnenQ)
|
||||
|
||||
<br/>
|
||||
This software should be deployed using ROS Kinetic on Ubuntu 16.04 or 18.04.
|
||||
|
||||
Video: [https://www.youtube.com/watch?v=jxfJFgzmNSw&t](https://www.youtube.com/watch?v=jxfJFgzmNSw&t=3s)<br/>
|
||||
Paper Draft: [https://arxiv.org/abs/1712.00036](https://arxiv.org/abs/1712.00036)
|
||||
|
||||
## License
|
||||
|
||||
@ -28,16 +38,6 @@ cd your_work_space
|
||||
catkin_make --pkg msckf_vio --cmake-args -DCMAKE_BUILD_TYPE=Release
|
||||
```
|
||||
|
||||
## Calibration
|
||||
|
||||
An accurate calibration is crucial for successfully running the software. To get the best performance of the software, the stereo cameras and IMU should be hardware synchronized. Note that for the stereo calibration, which includes the camera intrinsics, distortion, and extrinsics between the two cameras, you have to use a calibration software. **Manually setting these parameters will not be accurate enough.** [Kalibr](https://github.com/ethz-asl/kalibr) can be used for the stereo calibration and also to get the transformation between the stereo cameras and IMU. The yaml file generated by Kalibr can be directly used in this software. See calibration files in the `config` folder for details. The two calibration files in the `config` folder should work directly with the EuRoC and [fast flight](https://github.com/KumarRobotics/msckf_vio/wiki) datasets. The convention of the calibration file is as follows:
|
||||
|
||||
`camx/T_cam_imu`: takes a vector from the IMU frame to the camx frame.
|
||||
`cam1/T_cn_cnm1`: takes a vector from the cam0 frame to the cam1 frame.
|
||||
|
||||
The filter uses the first 200 IMU messages to initialize the gyro bias, acc bias, and initial orientation. Therefore, the robot is required to start from a stationary state in order to initialize the VIO successfully.
|
||||
|
||||
|
||||
## EuRoC and UPenn Fast flight dataset example usage
|
||||
|
||||
First obtain either the [EuRoC](https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets) or the [UPenn fast flight](https://github.com/KumarRobotics/msckf_vio/wiki/Dataset) dataset.
|
||||
@ -75,6 +75,8 @@ To visualize the pose and feature estimates you can use the provided rviz config
|
||||
|
||||
## ROS Nodes
|
||||
|
||||
The general structure is similar to the structure of the MSCKF implementation this repository is derived from.
|
||||
|
||||
### `image_processor` node
|
||||
|
||||
**Subscribed Topics**
|
||||
|
||||
@ -647,9 +647,14 @@ void ImageProcessor::stereoMatch(
|
||||
image_handler::undistortPoints(cam0_points, cam0.intrinsics, cam0.distortion_model,
|
||||
cam0.distortion_coeffs, cam0_points_undistorted,
|
||||
R_cam0_cam1);
|
||||
<<<<<<< HEAD
|
||||
cam1_points = distortPoints(cam0_points_undistorted, cam1_intrinsics,
|
||||
cam1_distortion_model, cam1_distortion_coeffs);
|
||||
=======
|
||||
|
||||
cam1_points = image_handler::distortPoints(cam0_points_undistorted, cam1.intrinsics,
|
||||
cam1.distortion_model, cam1.distortion_coeffs);
|
||||
>>>>>>> photometry-jakobi
|
||||
}
|
||||
|
||||
// Track features using LK optical flow method.
|
||||
|
||||
Loading…
Reference in New Issue
Block a user